pyCub
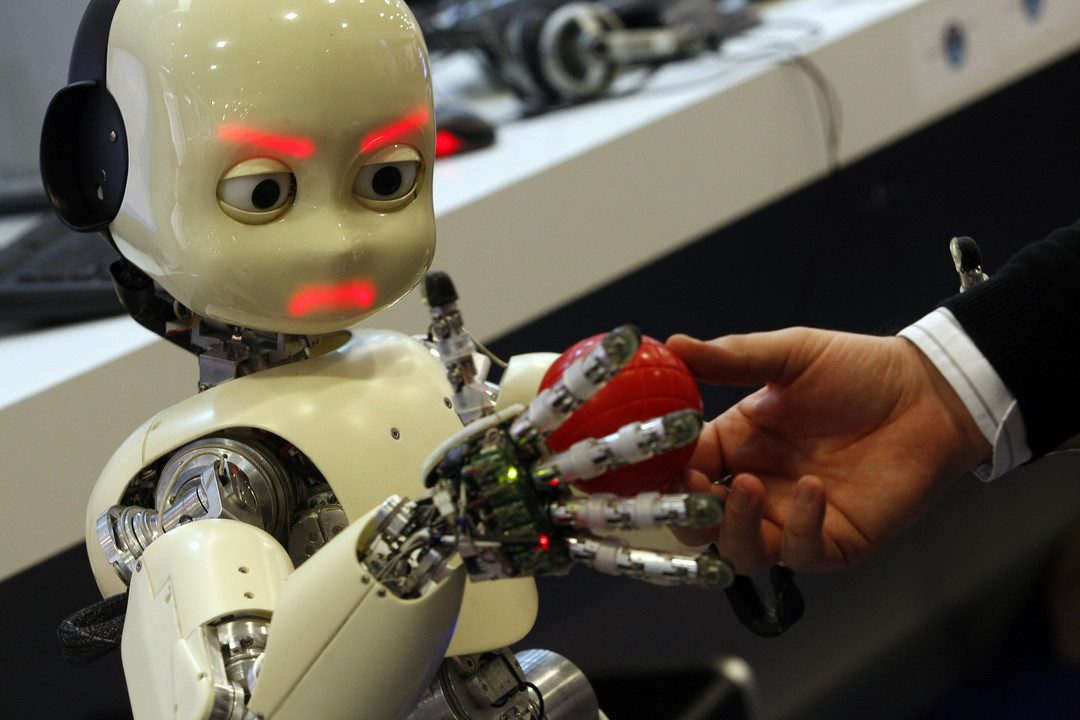
pyCub is a Python simulator for humanoid robot iCub. It was developed as a platform for a course at CTU FEE. It is based on PyBullet and Open3D. The idea behind its creation was to create a simulator of iCub that does not require knowledge of YARP and can be programmed in Python. And such, it is still missing some features that are available in the default Gazebo simulation. However, it serves as better platform for teaching “general humanoid robotics principles” as students do not have to learn things that are only usable when working with iCub.
So far, basic control in joint and cartesian space is implemented. However, proper planner is missing. On top of that, the skin is also emulated.
The code can be fount at GitHub and documentation can be found at lukasrustler.cz/pycub.

Leave a comment